Xiang Xu (Sam)
My research focuses on multimodal engineering agents and foundation models for design and manufacturing. I am currently a Member of Technical Staff at Prometheus. Previously, I was a Research Scientist at Autodesk Foundation Model Team, where I work on vision-language models and SDF-based methods for CAD generation. I completed PhD in CS from Simon Fraser Univeristy, supervised by Yasutaka Furukawa. And BSc in ECE from Carnegie Mellon University, advised by Kris Kitani.
-
PhD in CS, 2021 - 2024
Simon Fraser University
-
MSc in CS, 2019 - 2021
Simon Fraser University
-
BSc in ECE, 2014 - 2018
Carnegie Mellon University
-
Prometheus, 2026 - present
-
Autodesk Research, 2024 - 2026
-
Autodesk Research (Intern), 2022
Mentor: Pradeep Kumar Jayaraman
-
Facebook AI Research (Intern), 2020
Mentor: Hanbyul (Han) Joo
-
[2026-02] Deduplicated 1-Million ABC solids
Publications
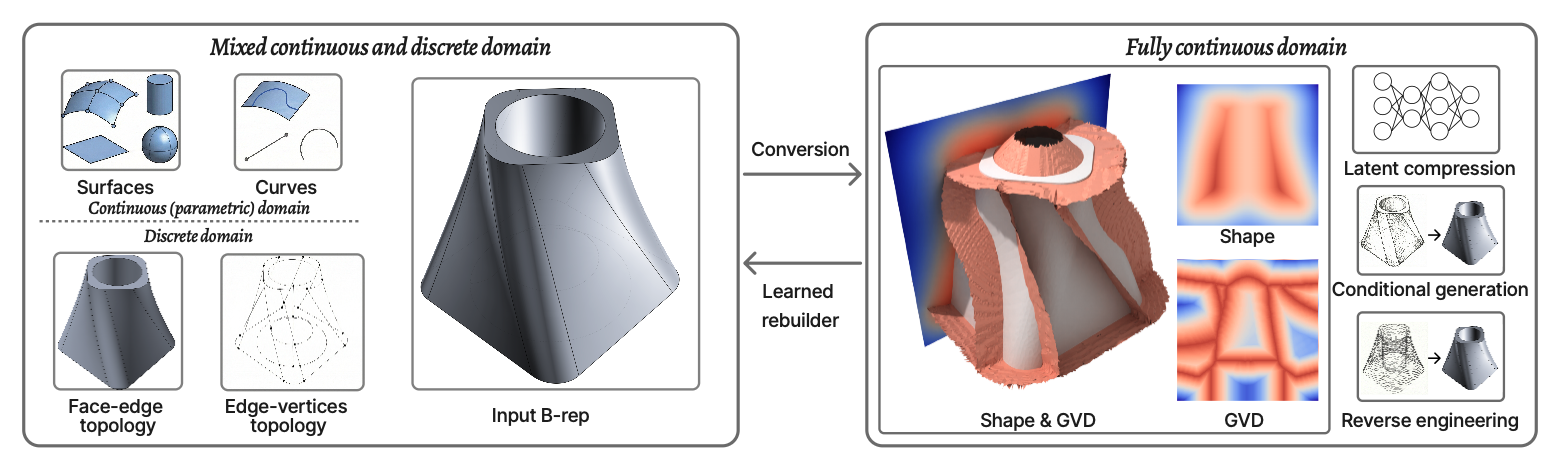
DualBrep reformulates CAD models into a fully continuous domain by encoding geometry as a Shape field and topology as a Generalized Voronoi Diagram field. These dual fields are compressed into a single, unified latent representation, enabling robust downstream tasks such as conditional generation and deterministic reverse engineering. A learned rebuilder extracts explicit, watertight B-rep models directly from these continuous signals.
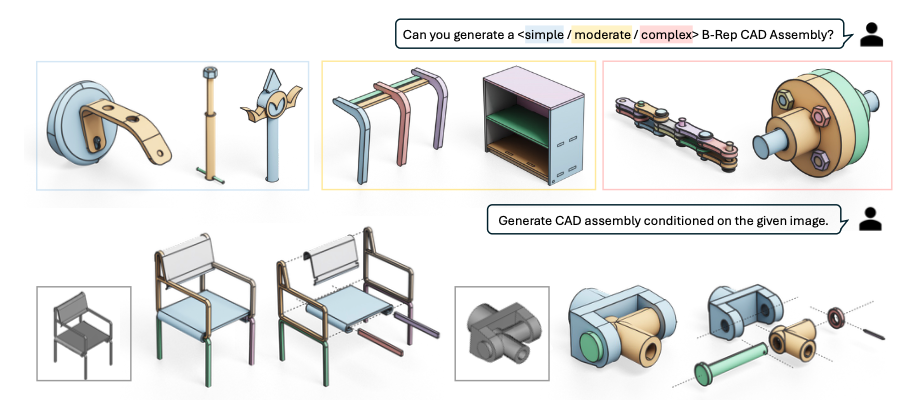
Given an image or a complexity specification, BRepAssembler directly generates high-quality CAD assemblies as multi-body B-Reps. Our approach is more than x2 faster than previous autoregressive methods using latent edge representations.
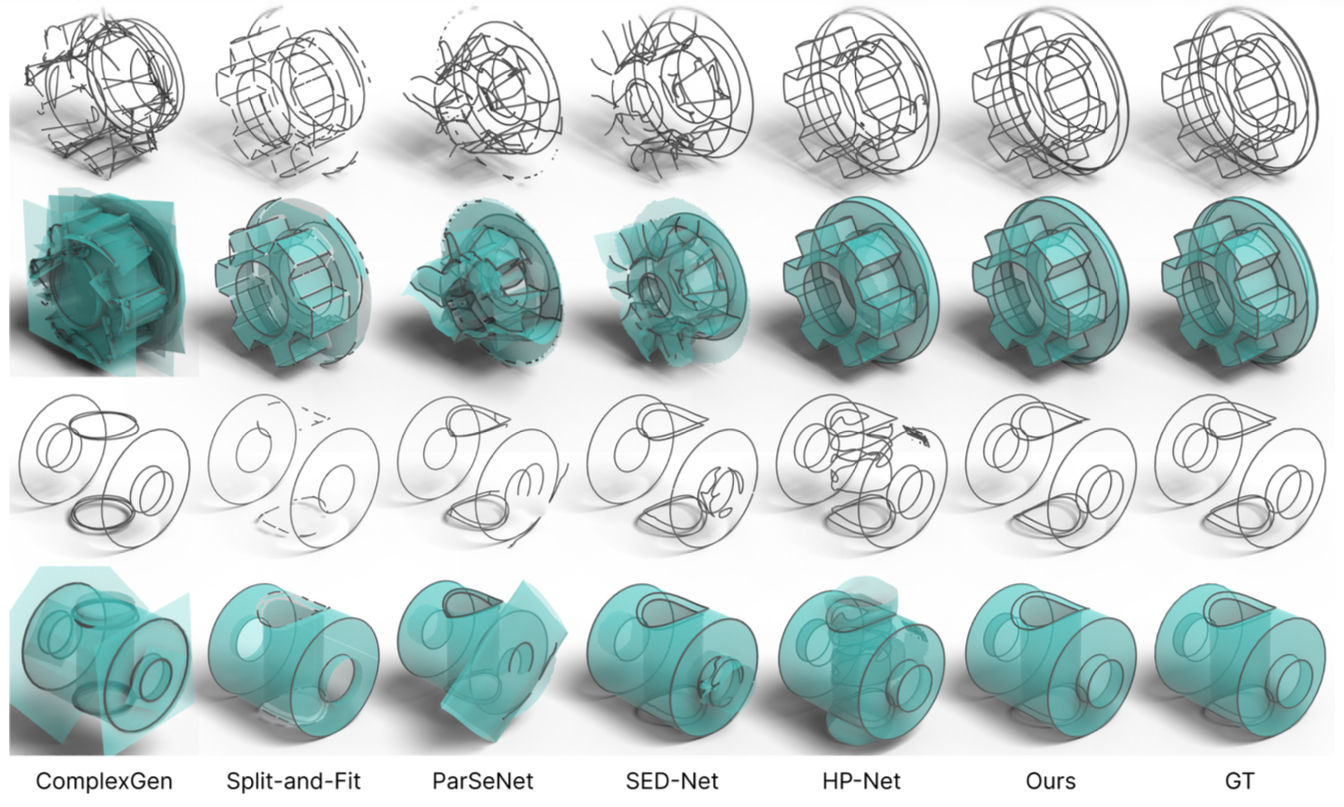
We adapt a pretrained SDF-based latent set with geometry-conditioned latent space to get segmentated meshes. The facted mesh is then reconstructed back into watertight B-Reps.
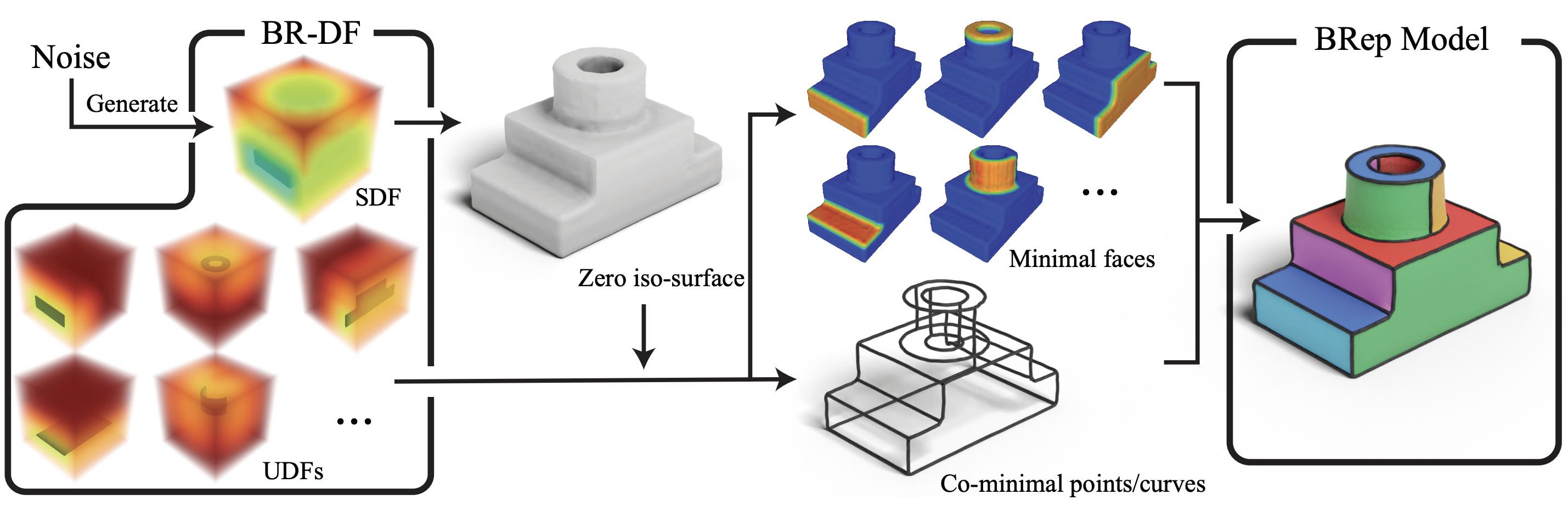
BR-DF is a geometric representation for Boundary Representation (B-Rep) models. An SDF encodes surface geometry. UDFs encode vertices, edges, faces, and their connectivity. An extension of the Marching Cubes converts BR-DF to a faceted B-Rep model.
AutoBrep is a unified autoregressive Transformer that progressively generates B-Rep geometry and topology discrete tokens following a breadth-first traversal of the face adjacency graph.
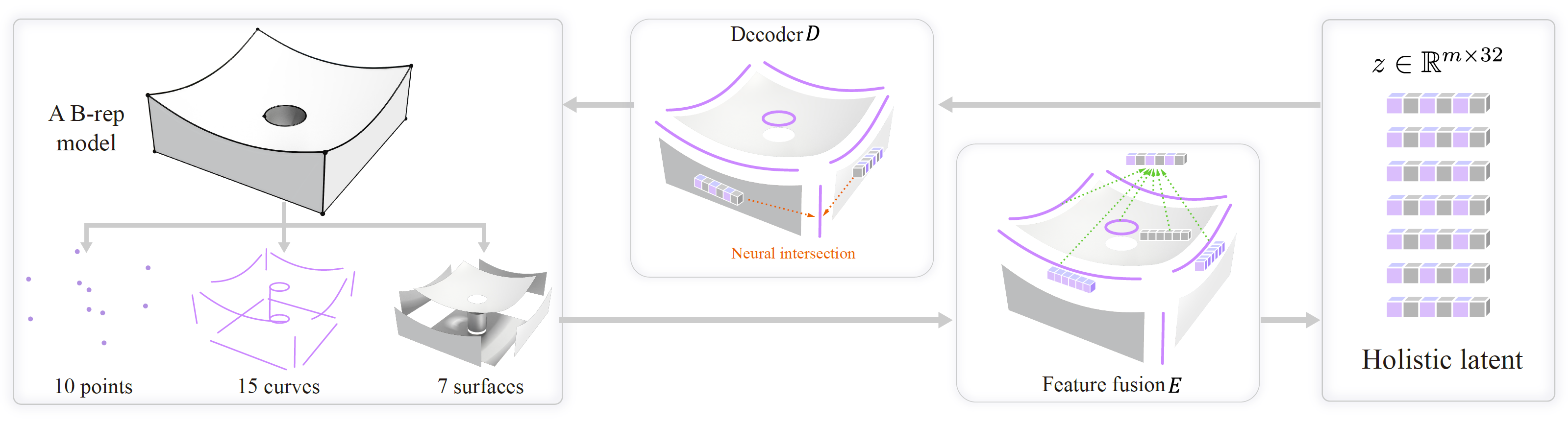
A unified BRep variational encoder (VAE) to encode a BRep's topological and geometric information into a holistic latent space, and a latent diffusion model generate such latent from multiple modalities
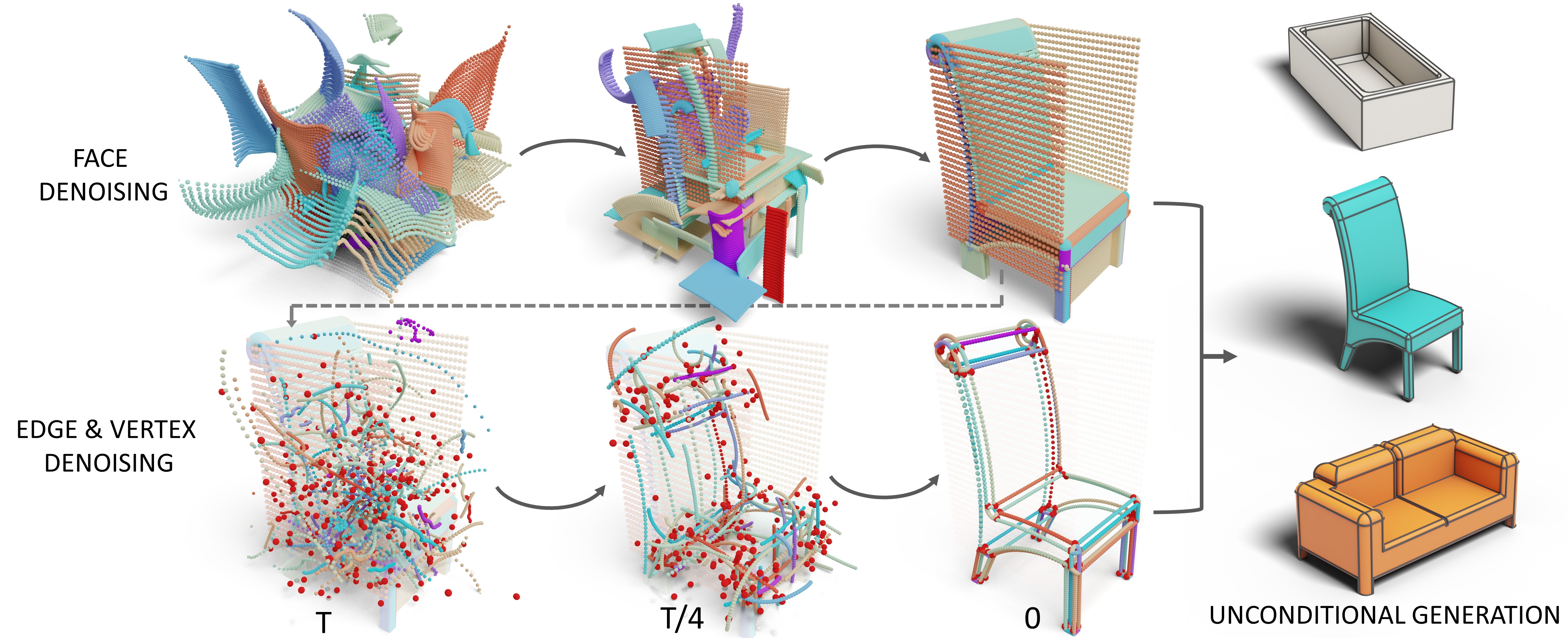
A diffusion-based generative approach that directly outputs a CAD B-rep. We represent a B-rep as a novel structured latent geometry tree format. B-rep topology is implicitly represented by node duplication.
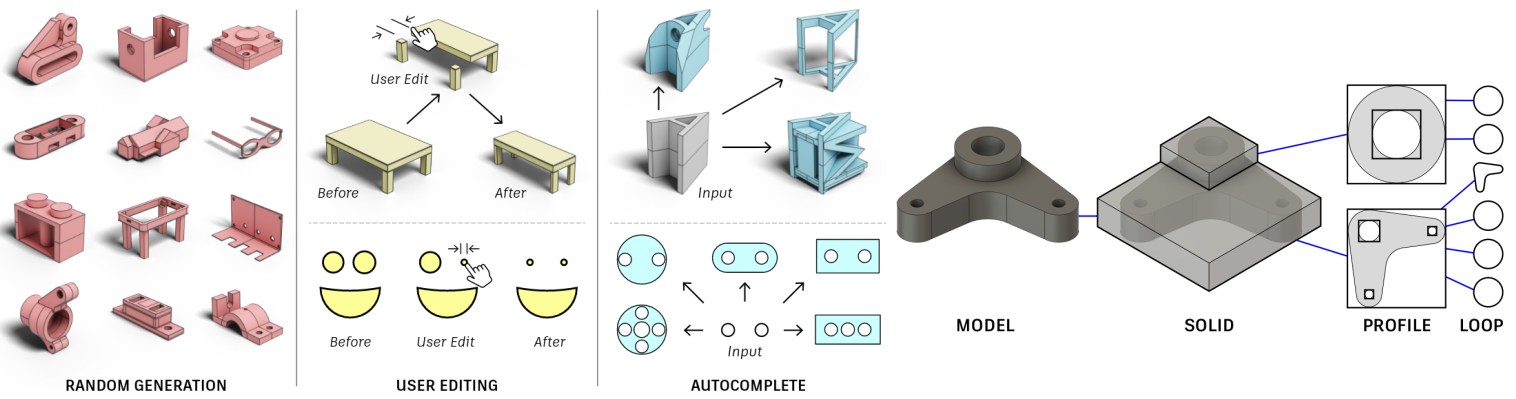
Represent high-level CAD design concepts as a hierarchical tree of neural codes. User controls the generation or auto-completion of CAD models by specifying the target design using a code tree.
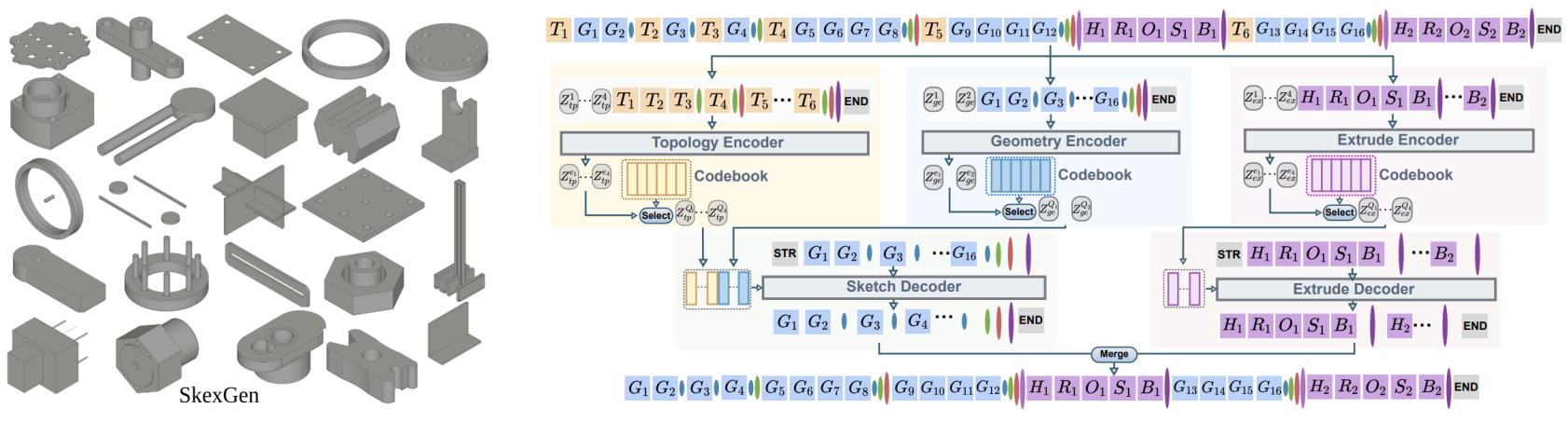
Using disentangled codebooks to generate diverse and high-quality CAD models, enhances user control, and enables efficient exploration of the CAD design space.
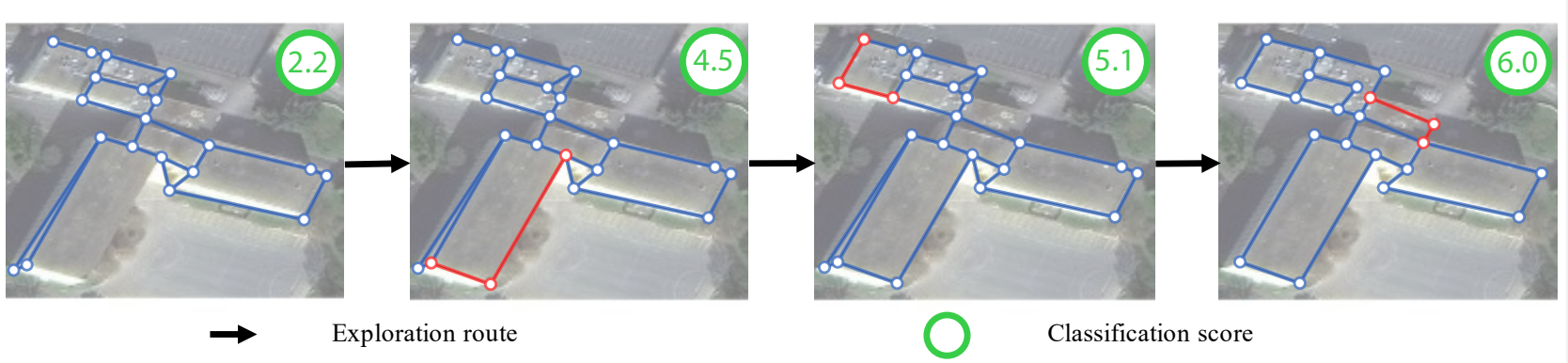
An explore-and-classify framework for building architectural reconstruction. Our method explores the structure space by heuristic modifications and classifing the correctness of updated results.
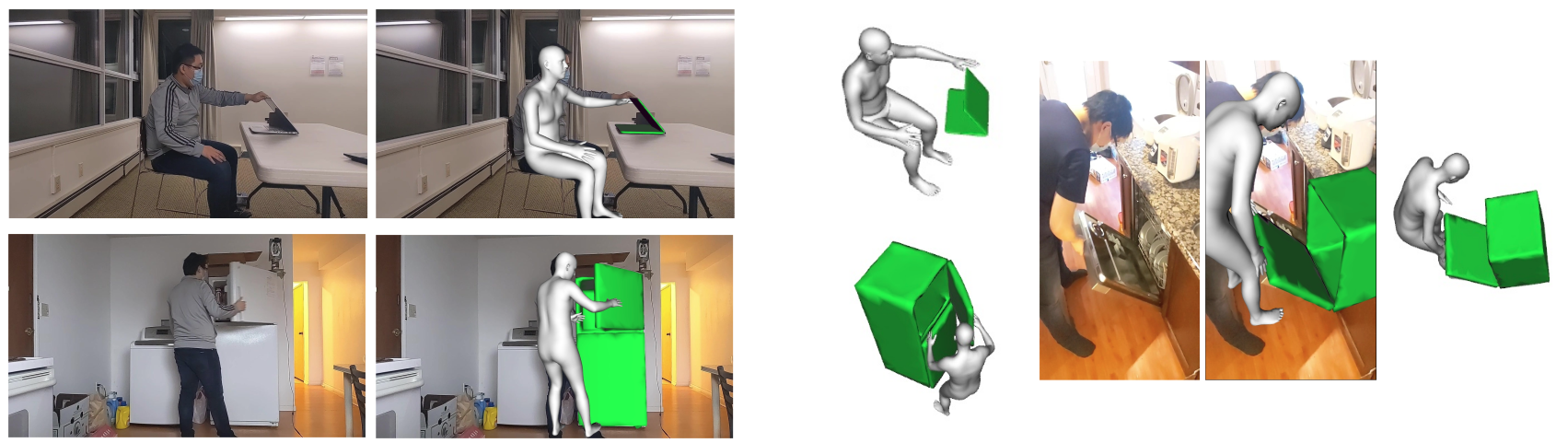
Monocular video dataset with ground truth annotations of 3D object pose, shape and part motion. We leverage 3D human pose for more accurate inference of the object spatial layout and dynamics.
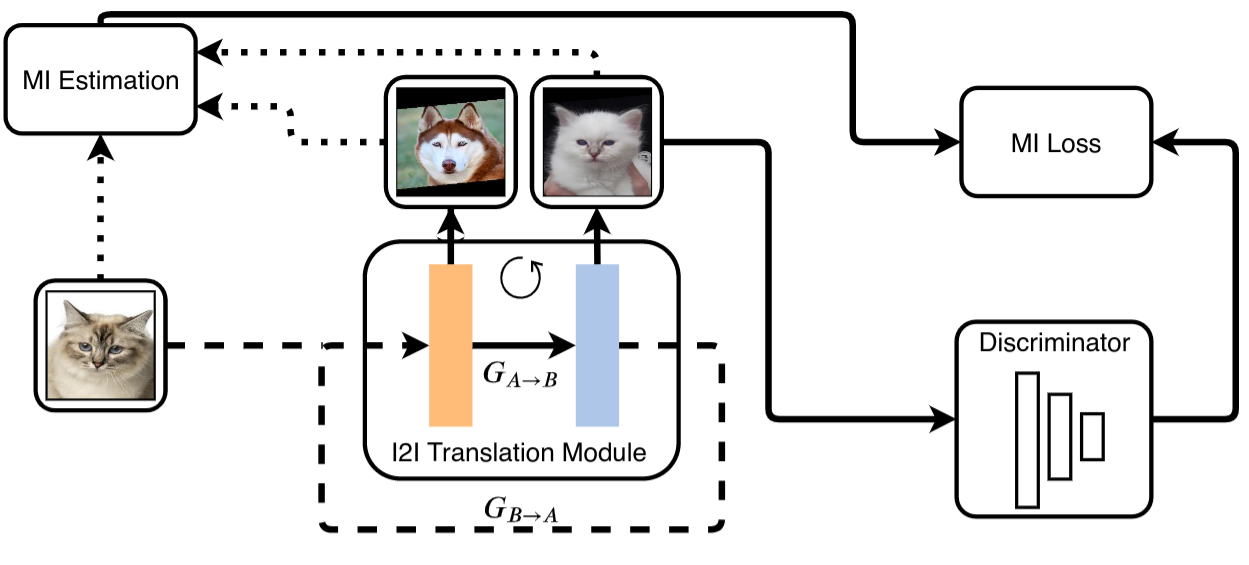
Treat single-cycle image translation as modules that can be used recurrently where the process is bounded by mutual information constraints between the input and output images.
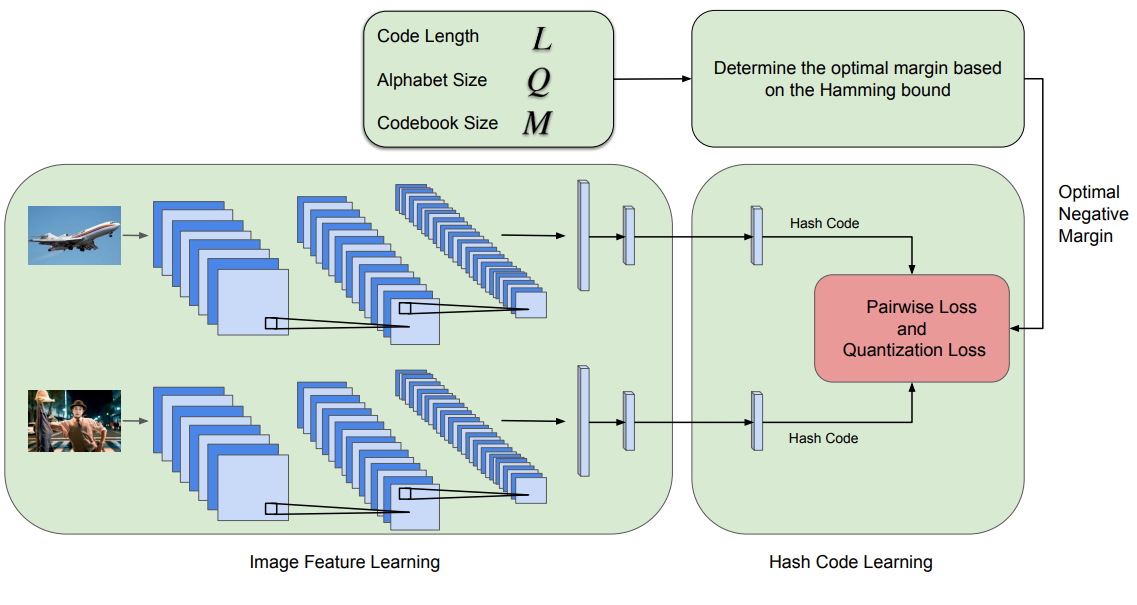
We use the Hamming bound to derive the optimal criteria for learning hash codes with a deep network.